ENGINEERING
Selected works in additive manufacturing, fabrication, and robotics.
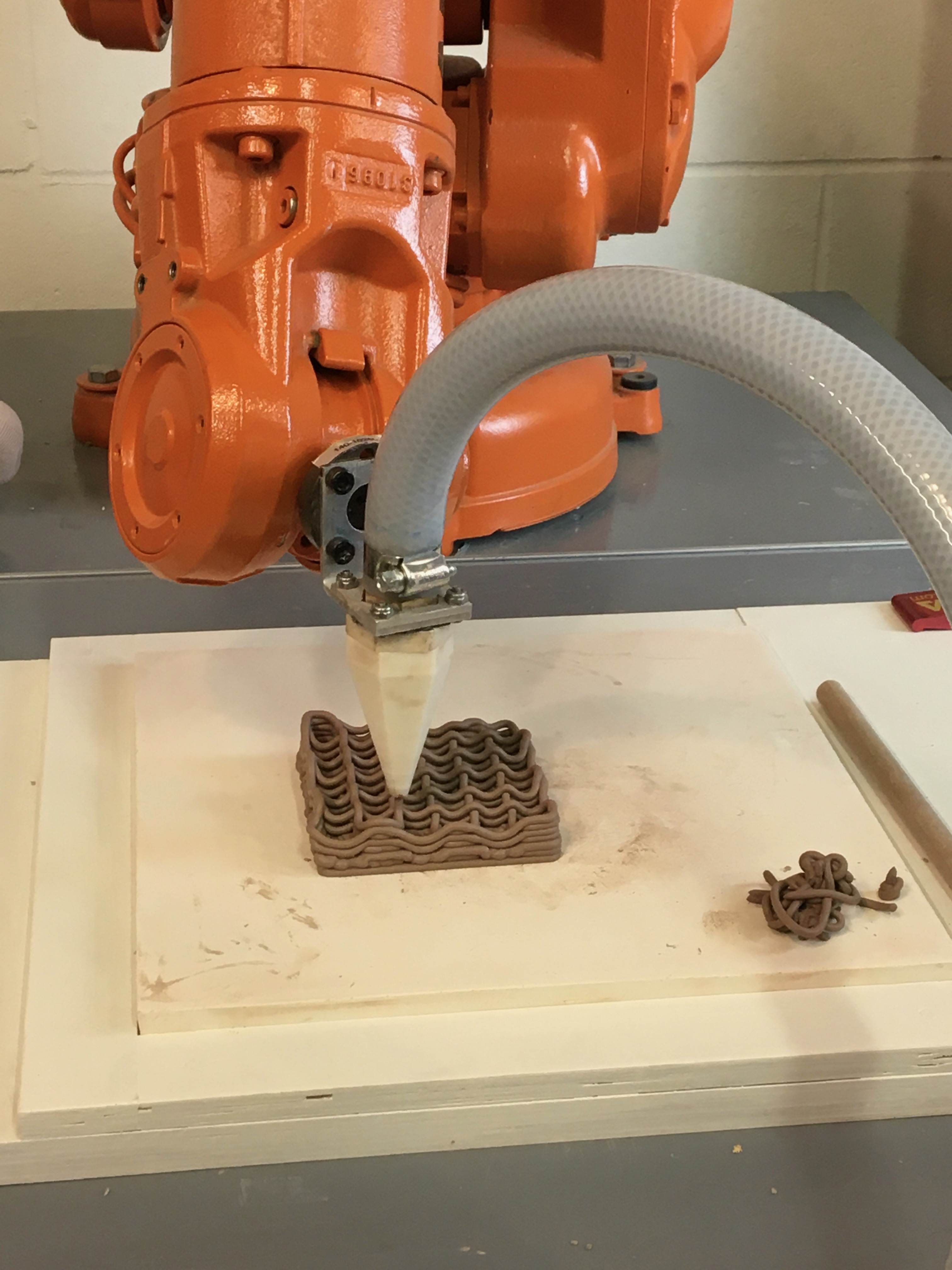
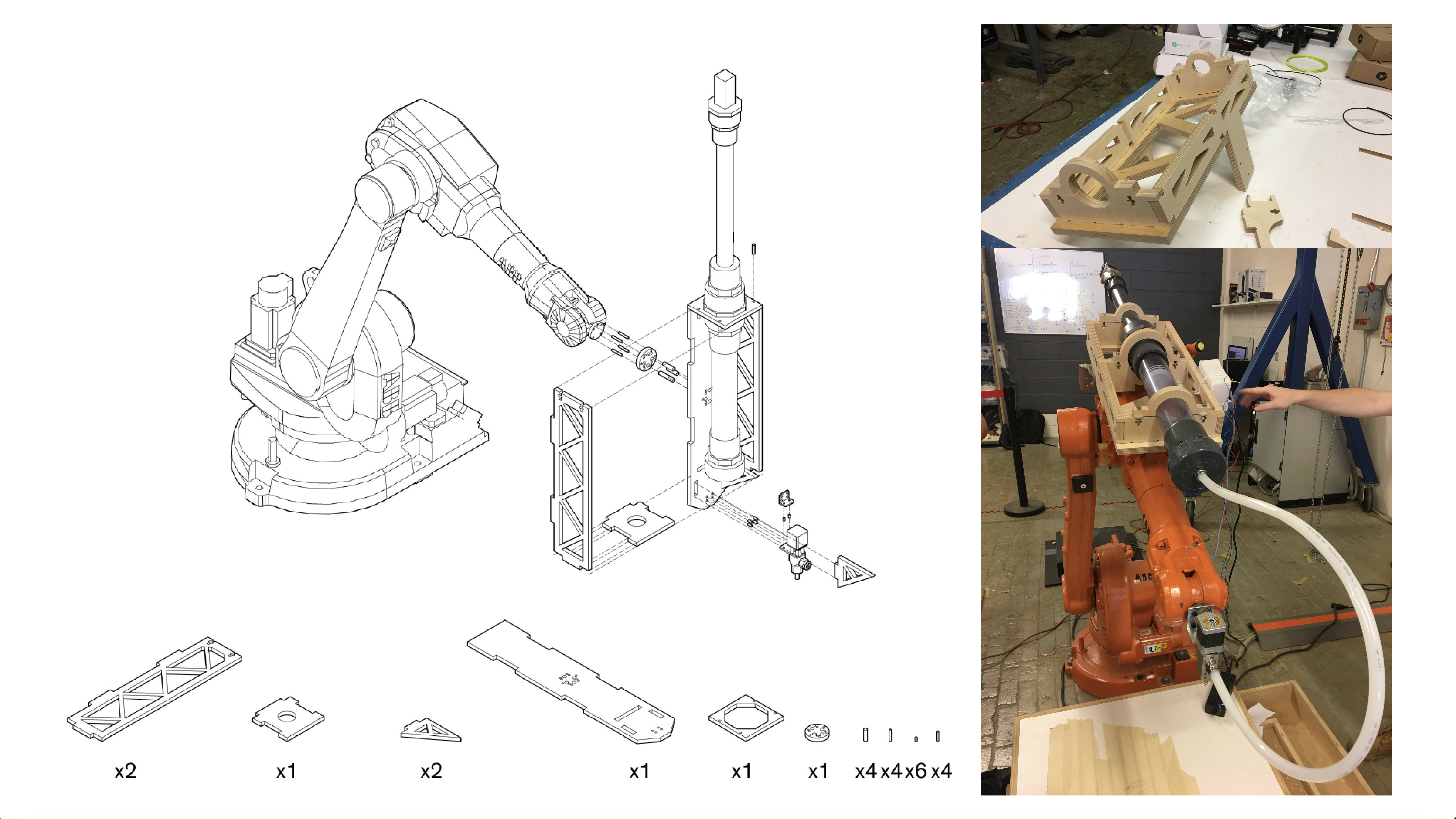
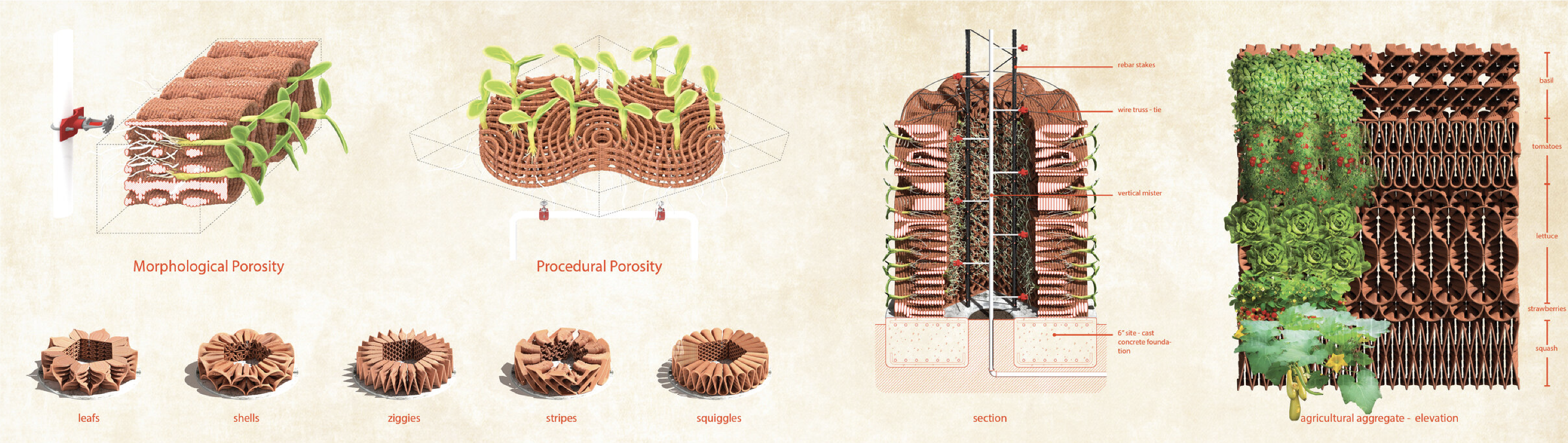
01 — ROBOTIC CLAY ADDITIVE MANUFACTURING
|
2021 |
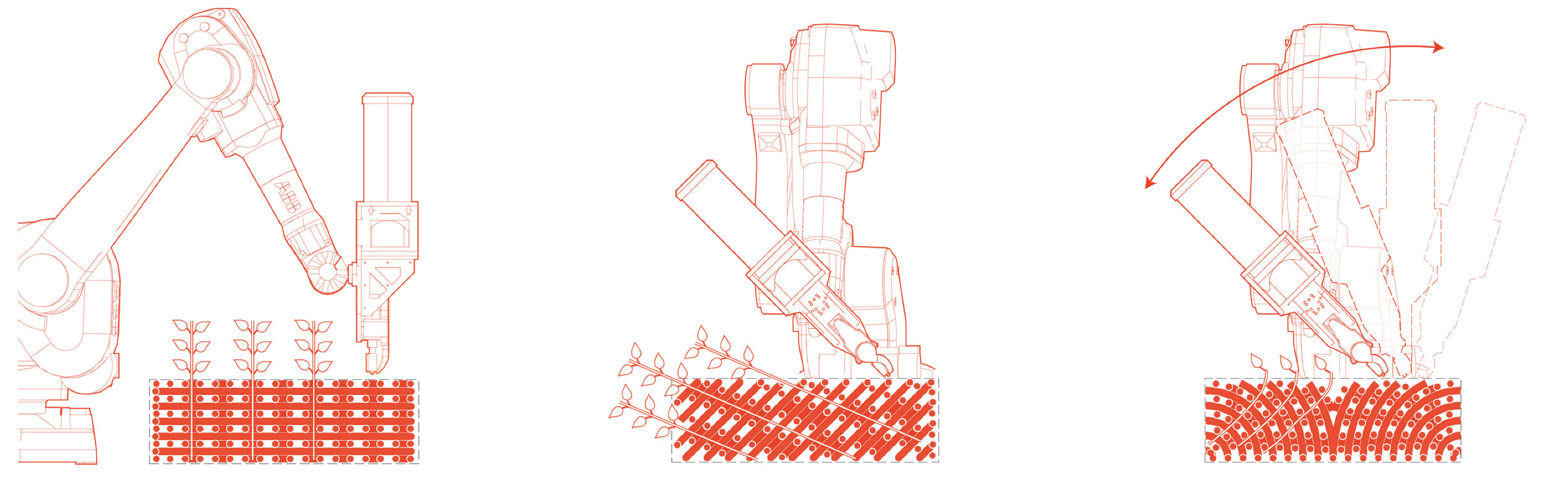
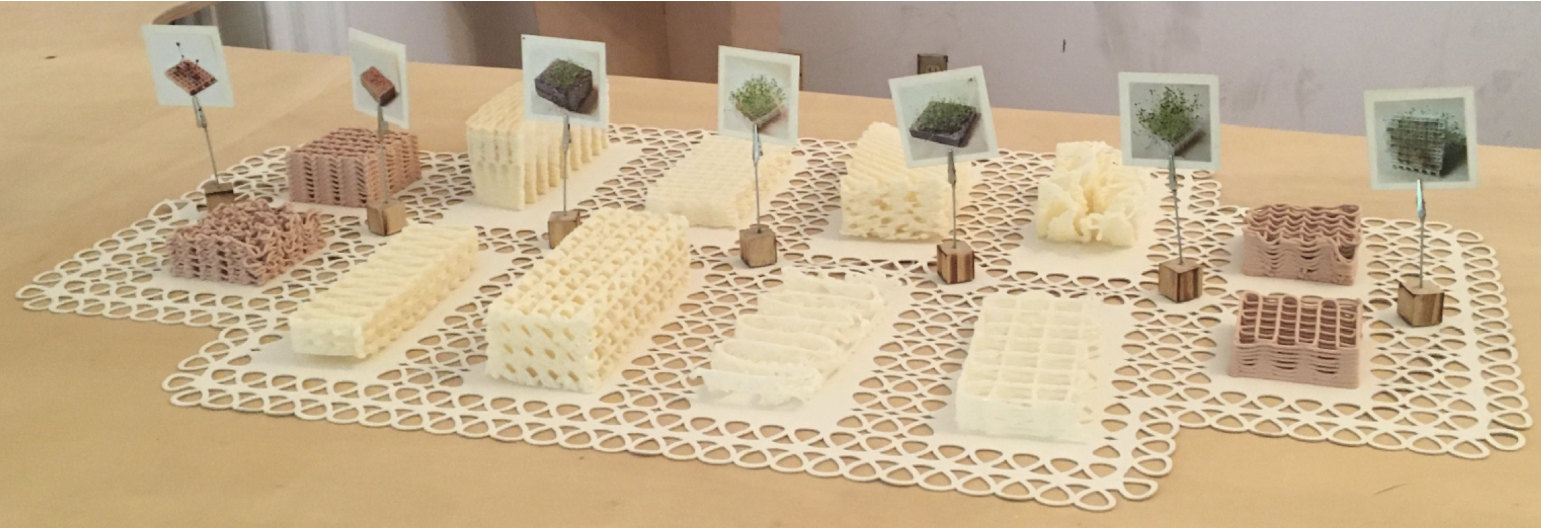
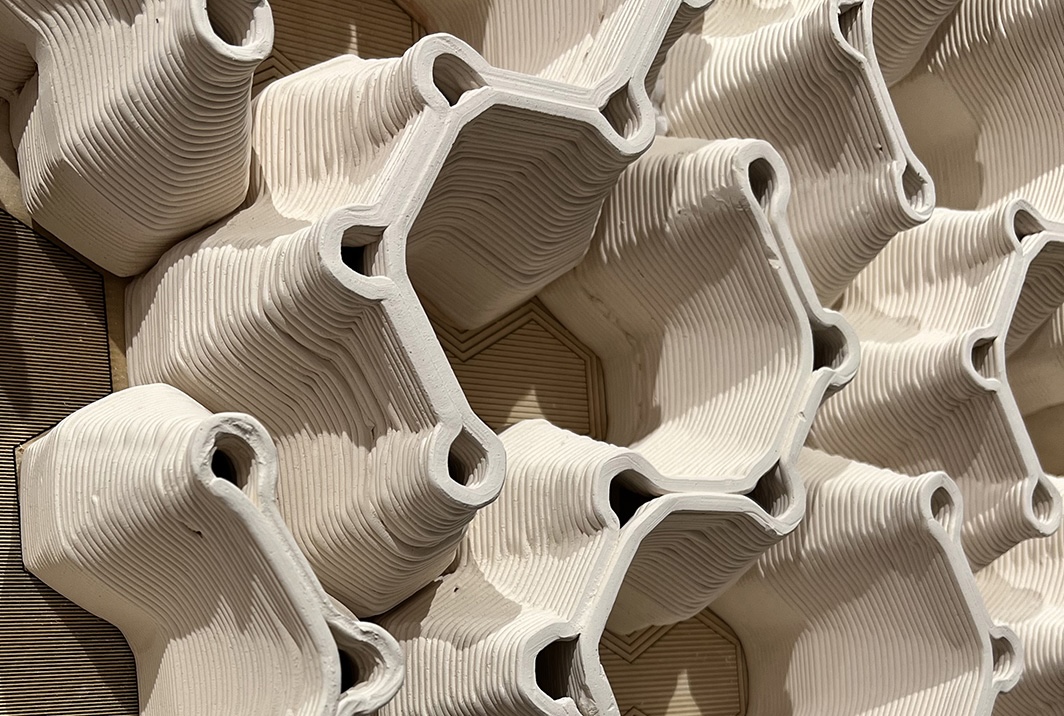
Aeroponic Aggregate is a robotic clay additive manufacturing project exploring the fabrication of custom masonry units through large-scale robotic extrusion. The project focuses on the design and production of 3D-modeled clay bricks fabricated using an ABB robotic arm equipped with a custom extruder.



|
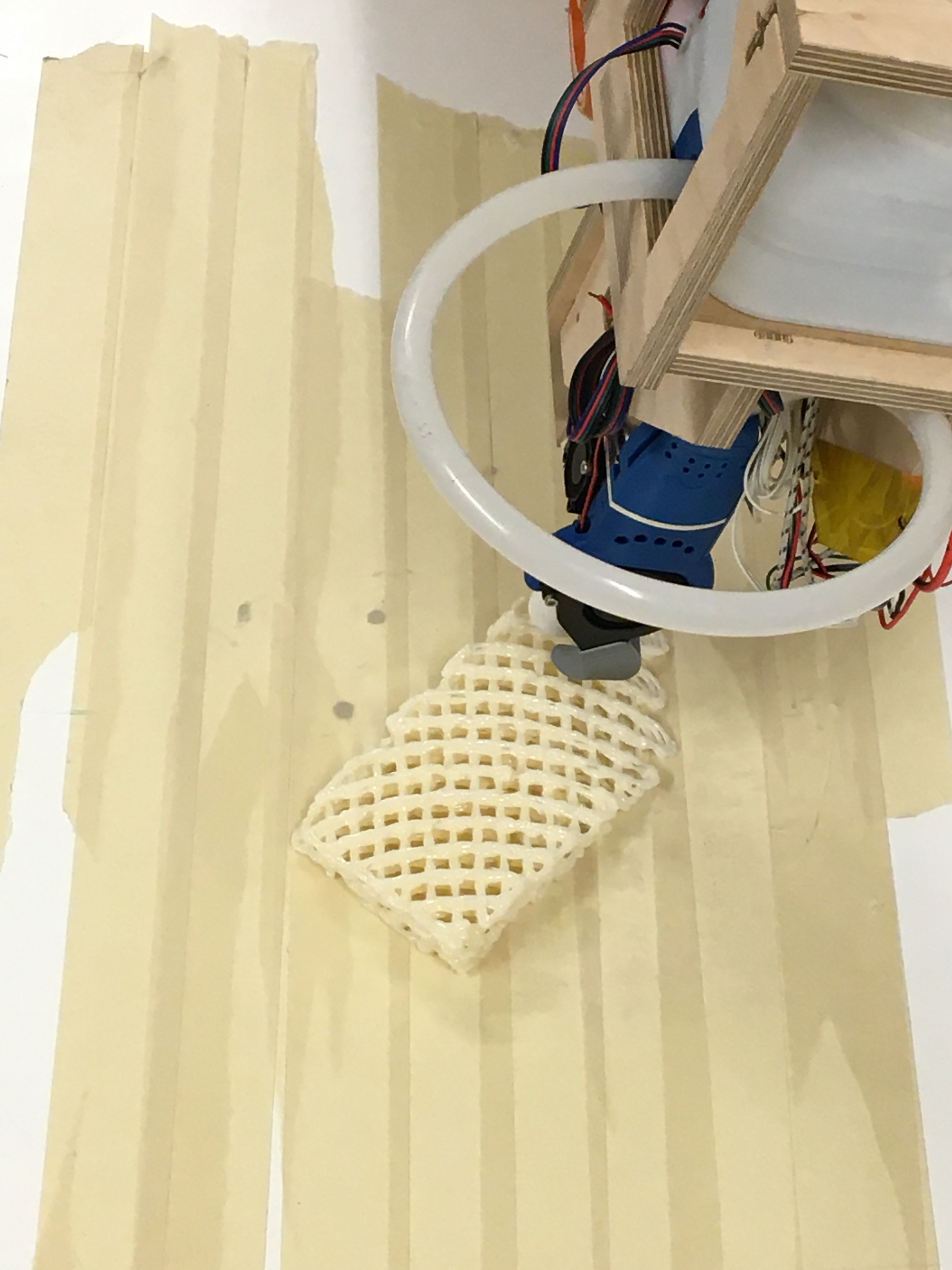
02 — BIOROBOTICS RESEARCH
|
2025–Present |
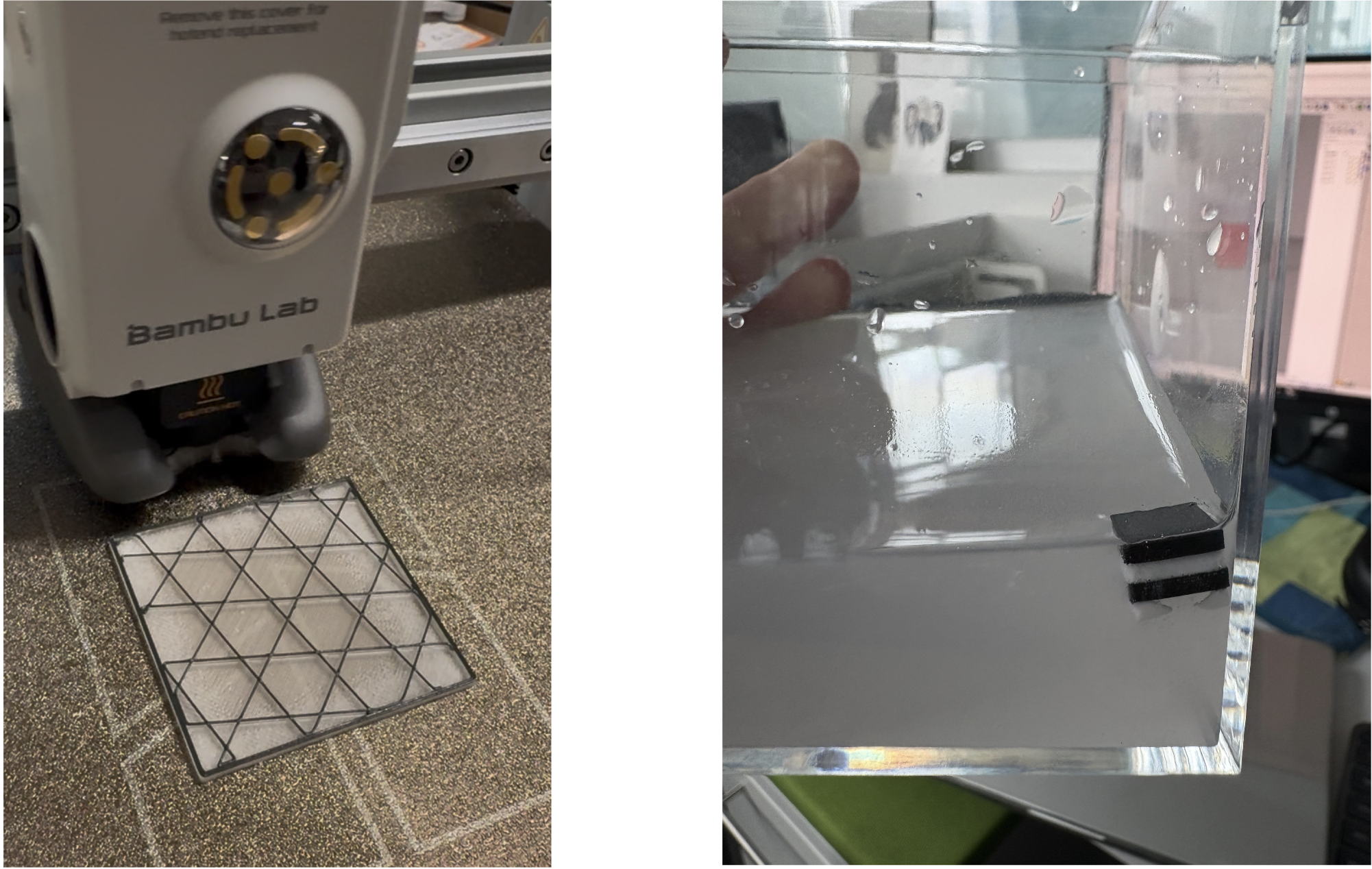
Multi-material additive manufacturing research focused on biodegradable and water-dissolvable soft robotic systems. Investigates material interfaces, print strategies, and controlled structural dissolution. 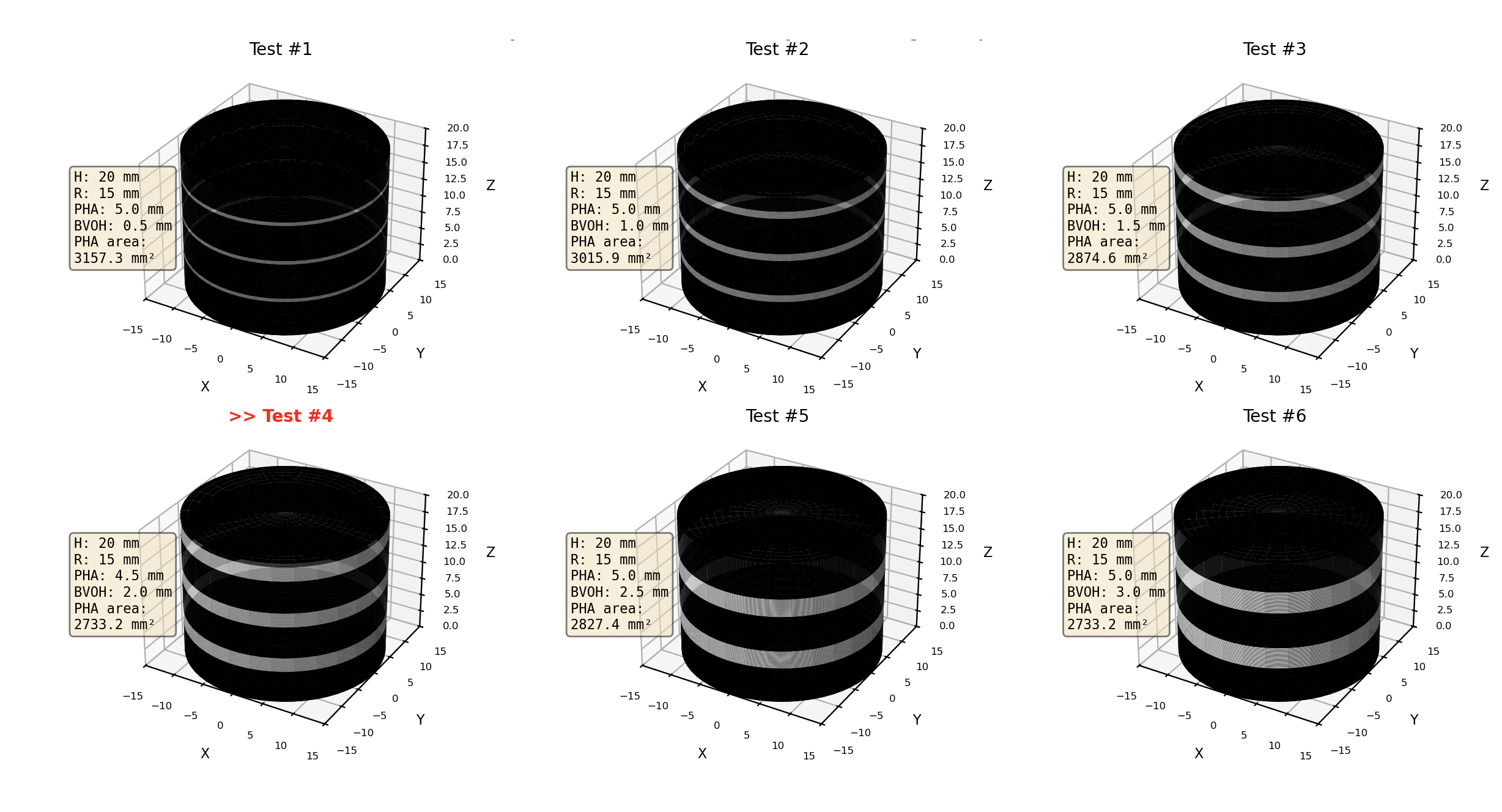

|
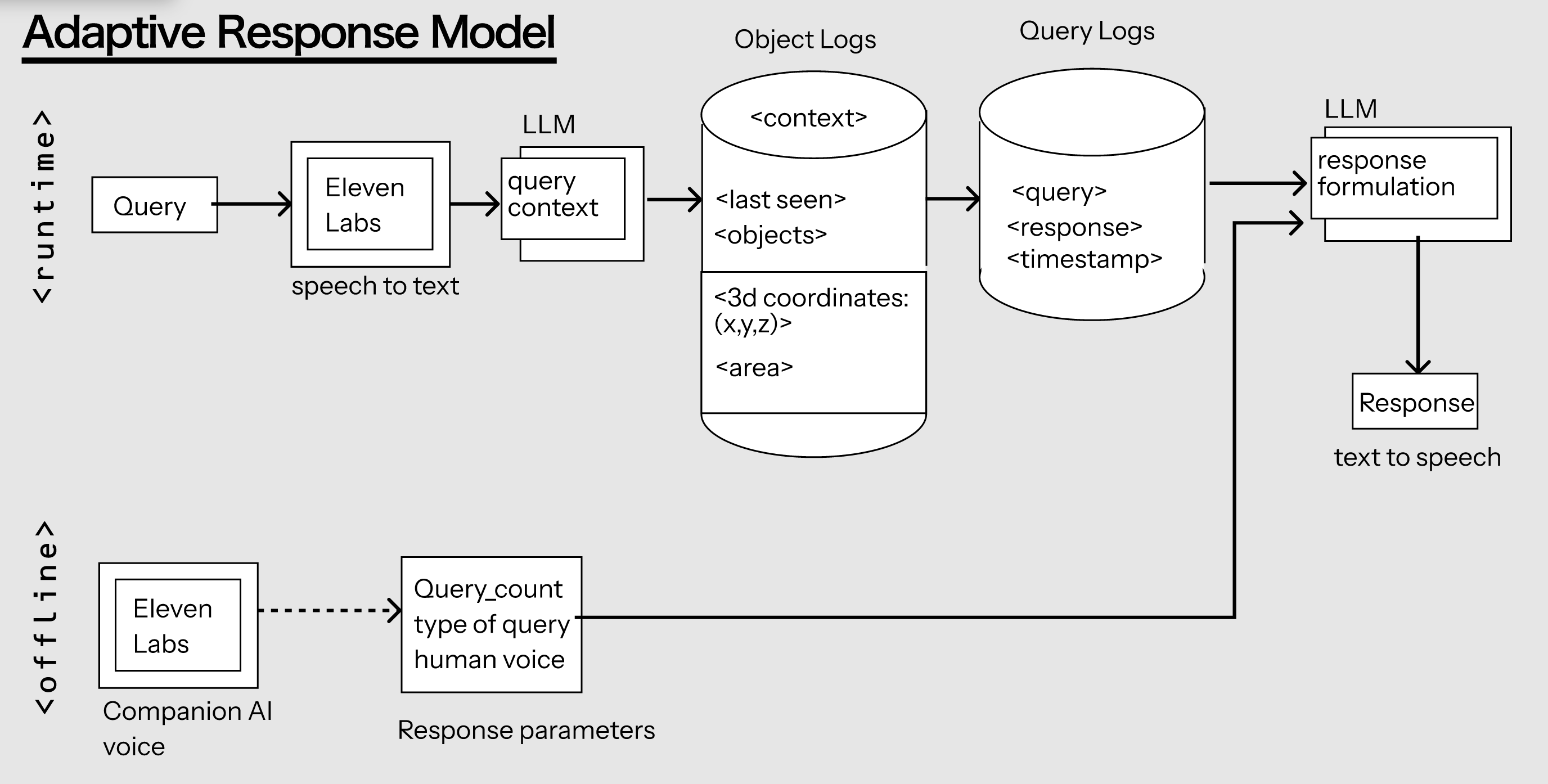
03 — TRACE — VISION-BASED OBJECT LOCALIZATION FOR MEMORY SUPPORT
|
2025 |
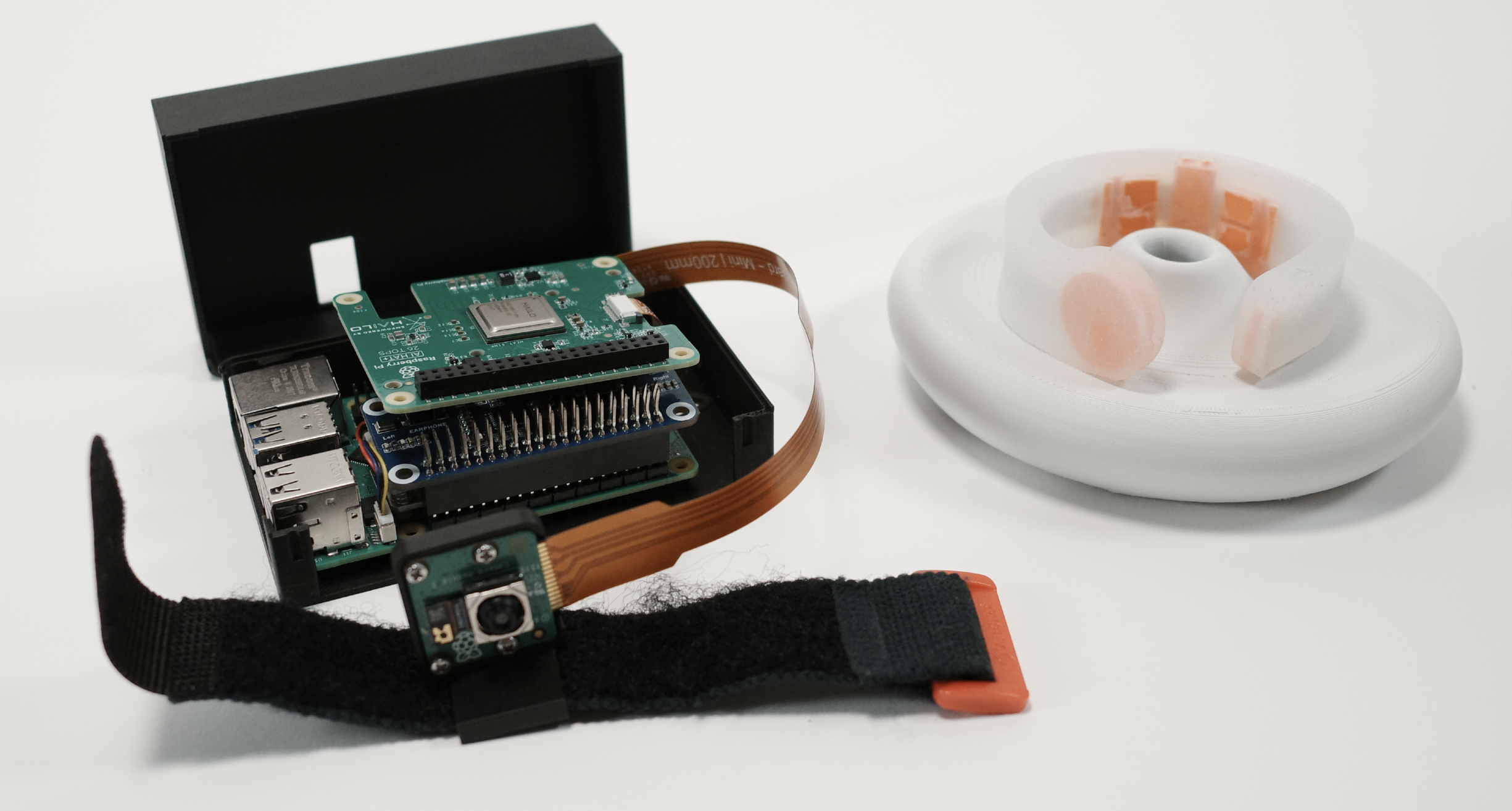
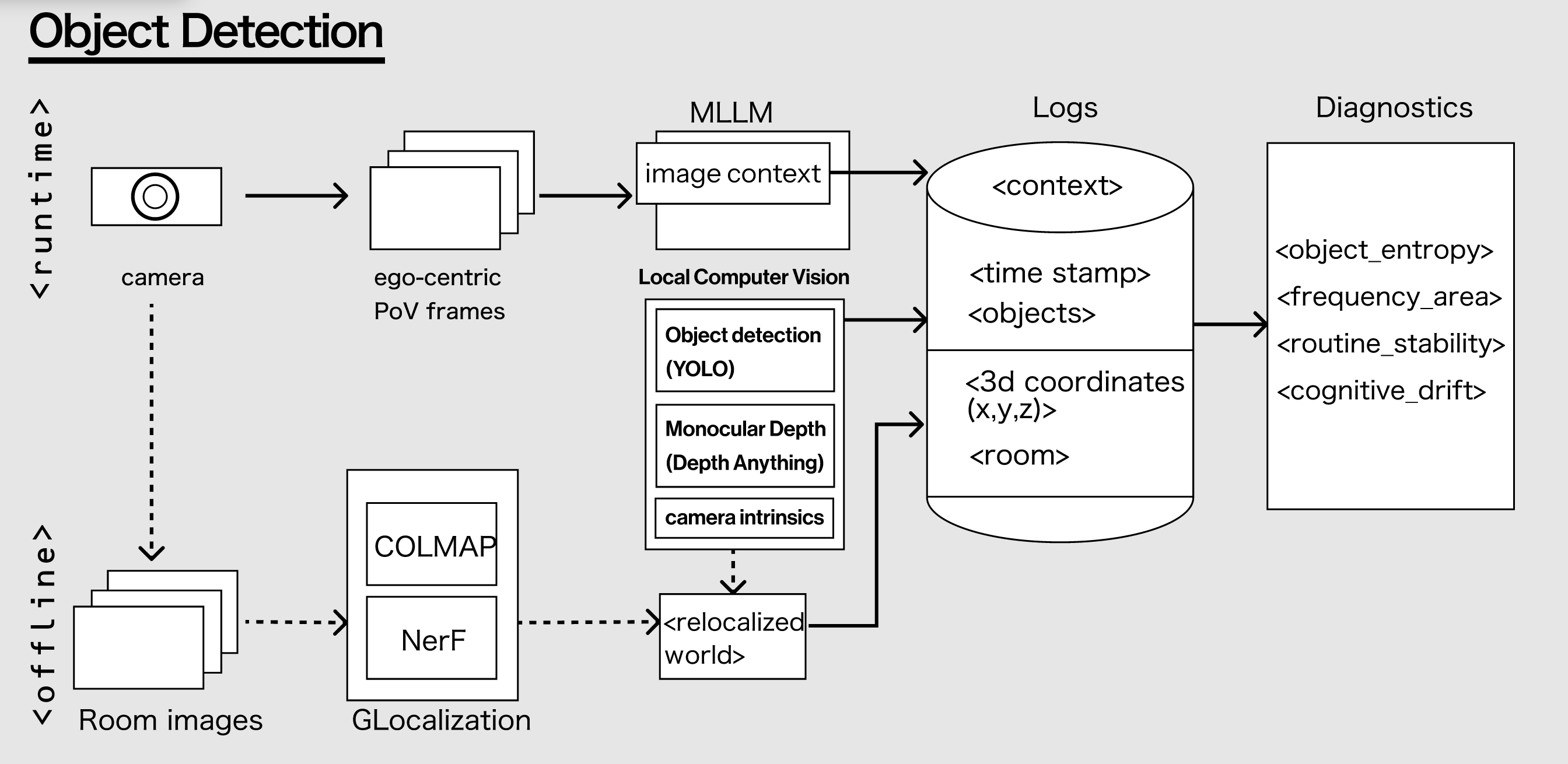
Trace is an assistive spatial memory system designed to support object recall for people with memory impairment. It combines wearable vision with 3D scene reconstruction to answer everyday queries such as "Where did I last leave my phone?"
|